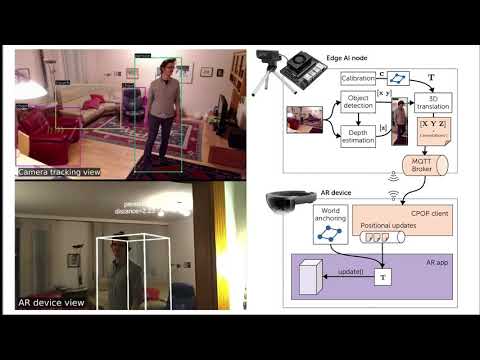
CPOP tracks physical and digital objects in a shared coordinate space.
To create a virtual environment and install all dependencies, run
make venv
source .venv/bin/activate
Default CPOP parameters are set in cpop/config.py, but most can be overwritten via command line arguments.
To use CPOP you first need to calibrate the intrinsic camera parameters, and then anchor the camera to a common origin
(extrinsic parameter calibration).
Camera parameters are stored in and loaded from ~/.cpop/cameras.
You can perform the calibration of the intrinsic camera parameters with the following command.
python -m cpop.cli.calibrate
The calibration uses a 5x7 ChArUco board with 4x4 markers, a square length of 3.5 cm, and marker length of 2.6 cm. You can download an A4 PDF here.
If you have an Intel Realsense Camera use the flag --realsense to enable the realsense camera.
After calibrating the camera, you can run
python -m cpop.cli.validate --charuco
and verify that the axis is plotted correctly onto the board. You can also remove the flag --charuco to individual
aruco markers, in which case you need to further specify the markers you want to detect. For example,
with aruco-marker-set SET_4x4_50 --aruco-marker-length 0.18 the script will detect 4x4 markers and calculate camera
positions based on the marker length of 18 cm.
Again use the flag --realsense to enable the realsense camera.
To perform the extrinsic camera calibration (i.e., anchoring the camera to a common origin), print an ArUco marker with id = 0 (can be configured) and place it on the floor visible to the camera. Then run
python -m cpop.cli.anchor --show
The script starts searching for a marker with the id 0 and, if it finds a single marker, will start collecting frames.
The flag --show displays an OpenCV window for visual validation, but can be removed to run in headless mode.
If the position of the marker remains stable for several frames, the script will prompt you to save the calculated
parameters and terminate. The output would look something like this:
state changed: AnchoringState.SEARCHING
state changed: AnchoringState.STABILIZING
state changed: AnchoringState.STABLE
rvec: [ 2.00492366 -1.29424414 0.61388495]
tvec: [-0.30172898 -0.08695201 2.60050308]
camera position: [-1.72633218 -1.02258803 1.68383734]
save these values and terminate? (y/n): y
For the values to be correct, it is essential that the --aruco-marker-length argument, or the ARUCO_MARKER_LENGTH
config parameter is set correctly.
The value describes the length of a marker side in meters.
Add the flag --realsense to use a connected realsense camera.
After intrinsic and extrinsic calibration the detector can be started to find the 3D position and bounding box of objects relative to the anchor point.
Make sure a MQTT broker is up and running, check out the cpop/config.py for configuration values. Then run
python -m cpop.cli.detector
which will start sending object positions into the configured MQTT topics.
The --realsense flag can be set to make use of Intel Realsense Cameras.
If the --realsense and --depth flags are set, the object positions and bounding box are calculated with an experimental algorithm using the depth of the Intel Realsense Camera.
Otherwise it is assumed that objects stand on the same plane as the anchor AruCo pattern.
This container is not GPU accelerated and will likely be pretty slow. But can be useful to run the calibration scripts.
docker build -f Dockerfile -t cognitivexr/cpop .
This requires the NVIDIA Container Toolkit
docker build -f Dockerfile.cuda11 -t cognitivexr/cpop:cuda-11 .
For the DISCE'21 workshop at IEEE VR we developed a simple demo "AR X-Ray Vision" application using Unity.