diff --git a/README.md b/README.md
index b045f94..7e67c97 100644
--- a/README.md
+++ b/README.md
@@ -1,6 +1,6 @@
# HelloDrum Arduino Library
This is a library for making E-Drum with Arduino.
-**Ver.0.7.4(4/27/2020) Work in progress.**
+**Ver.0.7.5(4/30/2020) Work in progress.**
## Description
@@ -190,11 +190,11 @@ Record the time you started closing the hi-hat and the time you finished closing
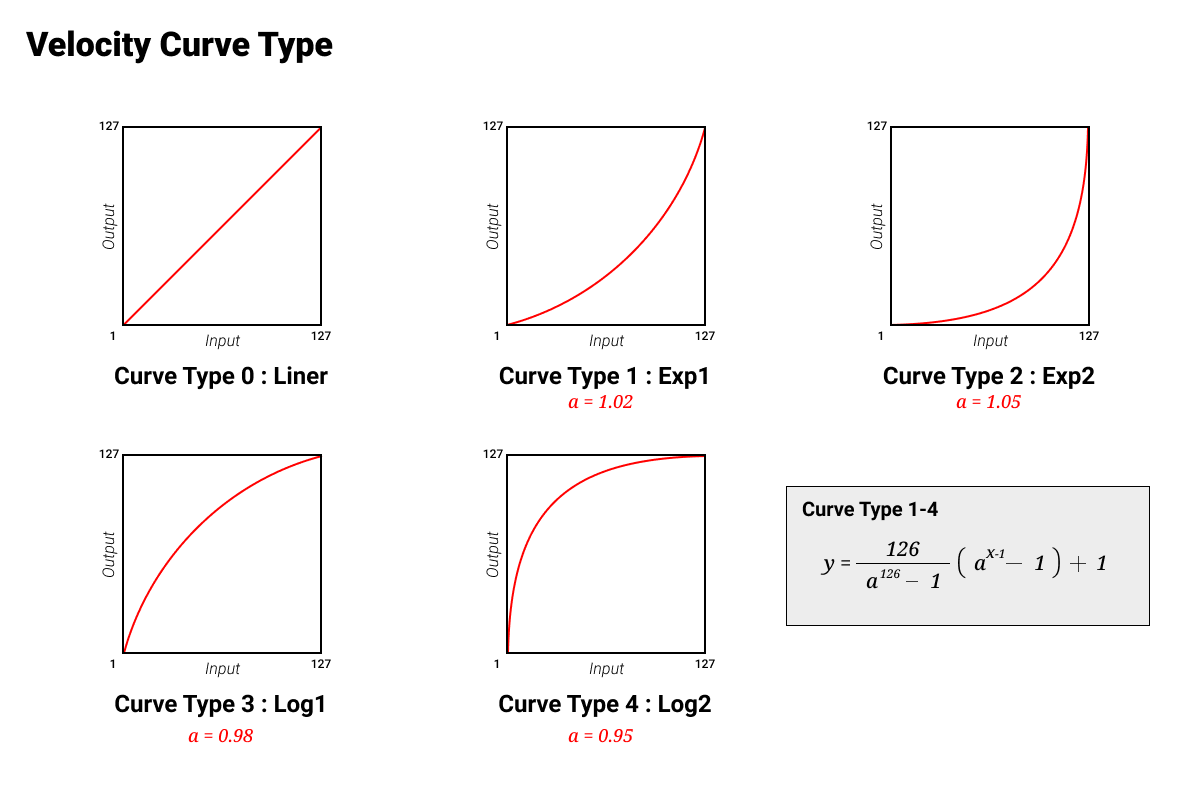
## Velocity Curve
- - Velocity Curve Type (Ver 0.7.4)
+ - Velocity Curve Type (Ver 0.7.5)
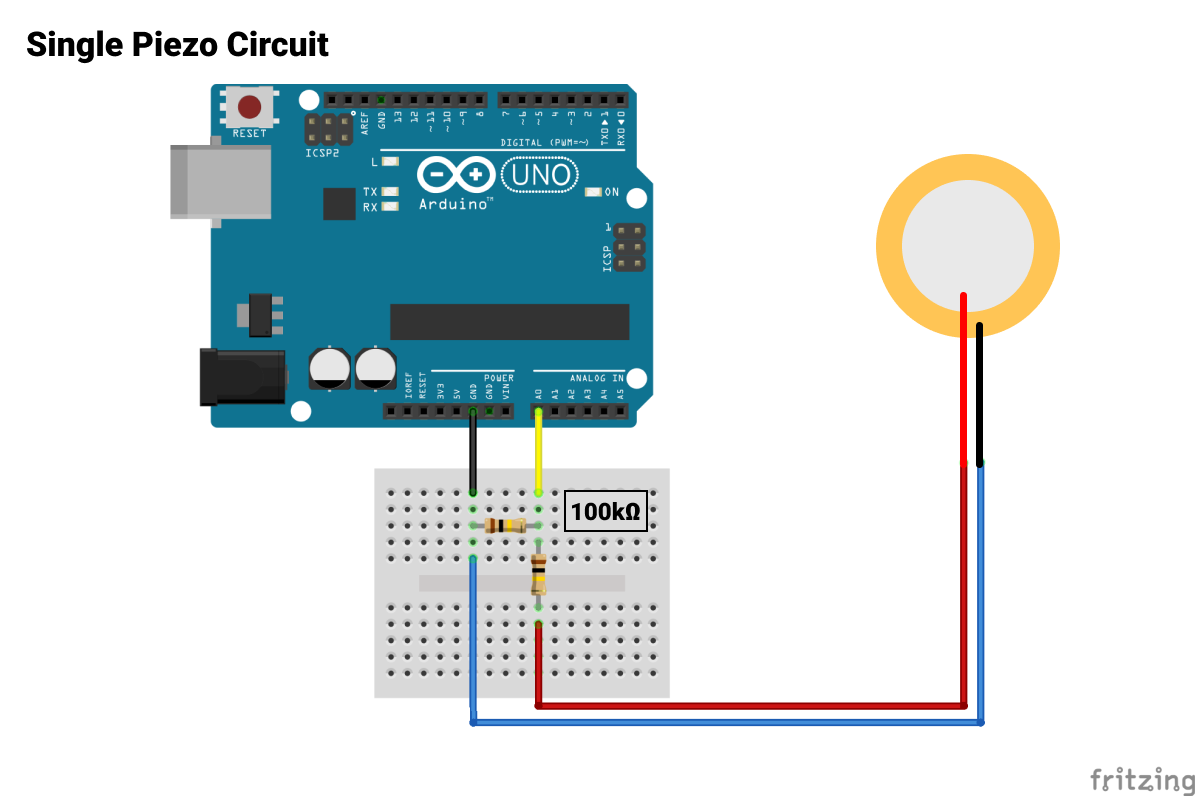
 -## Circuit (v0.7.4)
+## Circuit (v0.7.5)
- Single Piezo
-## Circuit (v0.7.4)
+## Circuit (v0.7.5)
- Single Piezo
 @@ -234,6 +234,12 @@ The STL data of pads from 6 inches to 12 inches, hi-hat controllers(
MIDI_CREATE_DEFAULT_INSTANCE();
-//Please name your piezo.
-//The piezo named "crash" is connected to the A0 pin and A1 pin.
+//Please name your cymbal.
+//The cymbal named "crash" is connected to the A0 pin (piezo) and A1 pin (edge sensor).
HelloDrum crash(0, 1);
void setup()
diff --git a/examples/Basic/cymbal_3zone/cymbal_3zone.ino b/examples/Basic/cymbal_3zone/cymbal_3zone.ino
index 468416e..2683b7a 100644
--- a/examples/Basic/cymbal_3zone/cymbal_3zone.ino
+++ b/examples/Basic/cymbal_3zone/cymbal_3zone.ino
@@ -1,7 +1,7 @@
/*
EXAMPLE - 3 Zone Cymbal Sensing
- This sample code tesed with YAMAHA PCY135/PCY155.
+ This sample code is tesed with YAMAHA PCY135/PCY155.
https://open-e-drums.tumblr.com/
*/
@@ -36,8 +36,8 @@ byte RIDE[10] = {
#include
MIDI_CREATE_DEFAULT_INSTANCE();
-//Please name your piezo.
-//The piezo named ride is connected to the A0 pin and A1 pin.
+//Please name your cymbal.
+//The cymbal named ride is connected to the A0 pin (piezo) and A1 pin (edge sensor).
HelloDrum ride(0, 1);
void setup()
diff --git a/examples/Basic/dualPiezoSensing/dualPiezoSensing.ino b/examples/Basic/dualPiezoSensing/dualPiezoSensing.ino
index 6c7da4d..812cab5 100644
--- a/examples/Basic/dualPiezoSensing/dualPiezoSensing.ino
+++ b/examples/Basic/dualPiezoSensing/dualPiezoSensing.ino
@@ -1,7 +1,7 @@
/*
EXAMPLE - Dual Piezo Sensing
- With this sample code, you can make 2 zone snare drum.
+ With this sample code, you can make 2-zone snare drum.
Tested with Roland PD-85
Pads & Controller Circuit:
@@ -61,7 +61,6 @@ void setup()
void loop()
{
-
//Sensing pad.
snare.dualPiezo(SNARE[0], SNARE[1], SNARE[2], SNARE[3], SNARE[4], SNARE[5]); //dualPiezo(byte sens, byte thre, byte scan, byte mask, byte rimSens, byte rimThre);
diff --git a/examples/Basic/hihat/hihat.ino b/examples/Basic/hihat/hihat.ino
index 1db8fbc..f4856a3 100644
--- a/examples/Basic/hihat/hihat.ino
+++ b/examples/Basic/hihat/hihat.ino
@@ -76,7 +76,7 @@ void loop()
MIDI.sendNoteOff(HIHAT[4], 0, 10);
}
//2.close
- else
+ else if (hihatPedal.closeHH == true)
{
MIDI.sendNoteOn(HIHAT[5], hihat.velocity, 10); //(note, velocity, channel)
MIDI.sendNoteOff(HIHAT[5], 0, 10);
@@ -84,7 +84,7 @@ void loop()
}
//when pedal is closed
- if (hihatPedal.closeHH == true)
+ if (hihatPedal.hit == true)
{
MIDI.sendNoteOn(HIHAT_PEDAL[5], hihatPedal.velocity, 10); //(note, velocity, channel)
MIDI.sendNoteOff(HIHAT_PEDAL[5], 0, 10);
diff --git a/examples/Basic/hihat_2zone/hihat_2zone.ino b/examples/Basic/hihat_2zone/hihat_2zone.ino
index 644dfdc..74f55fa 100644
--- a/examples/Basic/hihat_2zone/hihat_2zone.ino
+++ b/examples/Basic/hihat_2zone/hihat_2zone.ino
@@ -1,14 +1,14 @@
/*
- EXAMPLE - 2-zone Hi-Hat with hihat Controller (FSR or TCRT5000)
+ EXAMPLE - 2-zone Hi-Hat with hihat Controller (FSR or TCRT5000)
- This sample code tesed with Roland VH-10.
- https://open-e-drums.tumblr.com/
+ This sample code tesed with Roland VH-10.
+ https://open-e-drums.tumblr.com/
*/
/* NOTICE
- You have to install the MIDI library.
- MIDI : https://playground.arduino.cc/Main/MIDILibrary
+ You have to install the MIDI library.
+ MIDI : https://playground.arduino.cc/Main/MIDILibrary
*/
@@ -87,7 +87,7 @@ void loop()
MIDI.sendNoteOff(HIHAT[5], 0, 10);
}
//2.close
- else
+ else if (hihatPedal.closeHH == true)
{
MIDI.sendNoteOn(HIHAT[6], hihat.velocity, 10); //(note, velocity, channel)
MIDI.sendNoteOff(HIHAT[6], 0, 10);
@@ -105,7 +105,7 @@ void loop()
MIDI.sendNoteOff(HIHAT[7], 0, 10);
}
//2.close
- else
+ else if (hihatPedal.closeHH == true)
{
MIDI.sendNoteOn(HIHAT[8], hihat.velocity, 10); //(note, velocity, channel)
MIDI.sendNoteOff(HIHAT[8], 0, 10);
@@ -113,7 +113,7 @@ void loop()
}
//when pedal is closed
- if (hihatPedal.closeHH == true)
+ if (hihatPedal.hit == true)
{
MIDI.sendNoteOn(HIHAT_PEDAL[5], hihatPedal.velocity, 10); //(note, velocity, channel)
MIDI.sendNoteOff(HIHAT_PEDAL[5], 0, 10);
diff --git a/examples/EEPROM/SimpleSensing/SimpleSensing.ino b/examples/EEPROM/SimpleSensing/SimpleSensing.ino
index 3565ee8..06f46f8 100644
--- a/examples/EEPROM/SimpleSensing/SimpleSensing.ino
+++ b/examples/EEPROM/SimpleSensing/SimpleSensing.ino
@@ -1,5 +1,5 @@
/*
- EXAMPLE - Simple Piezo Sensing
+ EXAMPLE - Simple Piezo Sensing (EEPROM and LCD)
With this sample code, you will make snare and tom using two piezo.
https://open-e-drums.tumblr.com/
diff --git a/examples/EEPROM/minimalDrumkit/minimalDrumkit.ino b/examples/EEPROM/minimalDrumkit/minimalDrumkit.ino
index 81d4bbb..b6da4de 100644
--- a/examples/EEPROM/minimalDrumkit/minimalDrumkit.ino
+++ b/examples/EEPROM/minimalDrumkit/minimalDrumkit.ino
@@ -18,13 +18,12 @@
Button for BACK to digital pin 10
LCD Circuit:https://www.arduino.cc/en/Tutorial/HelloWorld
- LCD RS pin to digital pin 12
- LCD Enable pin to digital pin 11
- LCD D4 pin to digital pin 5
- LCD D5 pin to digital pin 4
- LCD D6 pin to digital pin 3
- LCD D7 pin to digital pin 2
-
+ LCD RS pin to digital pin 12
+ LCD Enable pin to digital pin 11
+ LCD D4 pin to digital pin 5
+ LCD D5 pin to digital pin 4
+ LCD D6 pin to digital pin 3
+ LCD D7 pin to digital pin 2
https://open-e-drums.tumblr.com/
*/
@@ -158,6 +157,23 @@ void loop()
lcd.print(hitPad);
lcd.setCursor(0, 1);
lcd.print(velocity);
+
+ if (hihat.hit == true)
+ {
+ //check open or close
+ //1.open
+ if (hihatPedal.openHH == true)
+ {
+ lcd.setCursor(15, 0);
+ lcd.print("O");
+ }
+ //2.close
+ else if (hihatPedal.closeHH == true)
+ {
+ lcd.setCursor(15, 0);
+ lcd.print("C");
+ }
+ }
}
////////// 2. SENSING & SENDING MIDI////////////
@@ -195,7 +211,7 @@ void loop()
MIDI.sendNoteOff(hihat.noteOpen, 0, 10);
}
//2.close
- else
+ else if (hihatPedal.closeHH == true)
{
MIDI.sendNoteOn(hihat.noteClose, hihat.velocity, 10); //(note of close, velocity, channel)
MIDI.sendNoteOff(hihat.noteClose, 0, 10);
@@ -204,7 +220,7 @@ void loop()
//HIHAT CONTROLLER//
//when hihat is closed
- if (hihatPedal.closeHH == true)
+ if (hihatPedal.hit == true)
{
MIDI.sendNoteOn(hihatPedal.note, hihatPedal.velocity, 10); //(note of pedal, velocity, channel)
MIDI.sendNoteOff(hihatPedal.note, 0, 10);
diff --git a/examples/MUX/muxSensing_minimalDrumKit/muxSensing_minimalDrumkit.ino b/examples/MUX/muxSensing_minimalDrumKit/muxSensing_minimalDrumkit.ino
index c02c71a..5a603a4 100644
--- a/examples/MUX/muxSensing_minimalDrumKit/muxSensing_minimalDrumkit.ino
+++ b/examples/MUX/muxSensing_minimalDrumKit/muxSensing_minimalDrumkit.ino
@@ -207,7 +207,7 @@ void loop()
MIDI.sendNoteOff(hihat.noteOpen, 0, 10);
}
//2.close
- else
+ else if (hihatPedal.closeHH == true)
{
MIDI.sendNoteOn(hihat.noteClose, hihat.velocity, 10); //(note of close, velocity, channel)
MIDI.sendNoteOff(hihat.noteClose, 0, 10);
@@ -216,7 +216,7 @@ void loop()
//HIHAT CONTROLLER//
//when hihat is closed
- if (hihatPedal.closeHH == true)
+ if (hihatPedal.hit == true)
{
MIDI.sendNoteOn(hihatPedal.note, hihatPedal.velocity, 10); //(note of pedal, velocity, channel)
MIDI.sendNoteOff(hihatPedal.note, 0, 10);
diff --git a/library.properties b/library.properties
index c165071..59b0303 100644
--- a/library.properties
+++ b/library.properties
@@ -1,5 +1,5 @@
name=Hello Drum
-version=0.7.4
+version=0.7.5
author=Ryo Kosaka
maintainer=Ryo Kosaka
sentence=Arduino Library for piezo sensing
diff --git a/src/hellodrum.cpp b/src/hellodrum.cpp
index aa1a83c..b295c38 100644
--- a/src/hellodrum.cpp
+++ b/src/hellodrum.cpp
@@ -1,13 +1,14 @@
/*
- "HELLO DRUM LIBRARY" Ver.0.7.4
+ "HELLO DRUM LIBRARY" Ver.0.7.5
- by Ryo Kosaka, Claudio Cas
+ by Ryo Kosaka
GitHub : https://github.com/RyoKosaka/HelloDrum-arduino-Library
Blog : https://open-e-drums.tumblr.com/
*/
-//#define DEBUG_DRUM //<-- uncomment this line to have debug value on Serial
+//#define DEBUG_DRUM //<-- uncomment this line to enable debug mode with Serial.
+//#define PULLUP //<-- uncomment this line to enable pullup mode.
#include "hellodrum.h"
#include "Arduino.h"
@@ -23,6 +24,10 @@ HelloDrum::HelloDrum(byte pin1)
{
pin_1 = pin1;
+#ifdef PULLUP
+ pinMode(pin_1, INPUT_PULLUP);
+#endif
+
//initial EEPROM value
sensitivity = 100; //0
threshold1 = 10; //1
@@ -46,6 +51,11 @@ HelloDrum::HelloDrum(byte pin1, byte pin2)
pin_1 = pin1;
pin_2 = pin2;
+#ifdef PULLUP
+ pinMode(pin_1, INPUT_PULLUP);
+ pinMode(pin_2, INPUT_PULLUP);
+#endif
+
//initial value
sensitivity = 100; //0
threshold1 = 10; //1
@@ -131,14 +141,16 @@ HelloDrumKnob::HelloDrumKnob(byte pin1)
void HelloDrum::singlePiezoSensing(byte sens, byte thre, byte scanTime, byte maskTime)
{
-
#ifdef ESP32
- int Threshold = thre * 40;
- int Sensitivity = sens * 40;
-#else
+ piezoValue = piezoValue / 4;
+#endif
+
+#ifdef PULLUP
+ piezoValue = (1024 - piezoValue);
+#endif
+
int Threshold = thre * 10;
int Sensitivity = sens * 10;
-#endif
hit = false;
@@ -189,13 +201,13 @@ void HelloDrum::singlePiezoSensing(byte sens, byte thre, byte scanTime, byte mas
padIndex = padNum;
#ifdef DEBUG_DRUM
- Serial.print("Hit : ");
+ Serial.print("[Hit] velocity : ");
Serial.print(velocity);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevVel);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
+ Serial.print(", ScanTime(ms) : ");
Serial.println((time_end - time_hit));
#endif
@@ -208,16 +220,19 @@ void HelloDrum::dualPiezoSensing(byte sens, byte thre, byte scanTime, byte maskT
{
#ifdef ESP32
- int Threshold = thre * 40;
- int Sensitivity = sens * 40;
- int RimThreshold = rimThre * 40;
- int RimSensitivity = rimSens * 40;
-#else
+ piezoValue = piezoValue / 4;
+ RimPiezoValue = RimPiezoValue / 4;
+#endif
+
+#ifdef PULLUP
+ piezoValue = (1024 - piezoValue);
+ RimPiezoValue = (1024 - RimPiezoValue);
+#endif
+
int Threshold = thre * 10;
int Sensitivity = sens * 10;
int RimThreshold = rimThre * 10;
int RimSensitivity = rimSens * 10;
-#endif
hit = false;
hitRim = false;
@@ -270,24 +285,20 @@ void HelloDrum::dualPiezoSensing(byte sens, byte thre, byte scanTime, byte maskT
velocityRim = curve(velocityRim, Threshold, Sensitivity, curvetype);
#ifdef DEBUG_DRUM
- Serial.print("HitRim : ");
+ Serial.print("[HitRim] velocity : ");
Serial.print(velocity);
- Serial.print(", ");
+ Serial.print(", velocity rim : ");
Serial.print(velocityRim);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevVel);
Serial.print(", ");
Serial.print(prevVelR);
- Serial.print(", ");
+ Serial.print(", head - rim : ");
Serial.print(prevVel - prevVelR);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
- Serial.print((time_end - time_hit));
- Serial.print(", ");
- Serial.print(RimSensitivity);
- Serial.print(", ");
- Serial.println(RimThreshold);
+ Serial.print(", ScanTime(ms) : ");
+ Serial.println((time_end - time_hit));
#endif
velocity = velocityRim;
hitRim = true;
@@ -300,24 +311,20 @@ void HelloDrum::dualPiezoSensing(byte sens, byte thre, byte scanTime, byte maskT
velocityRim = curve(velocityRim, Threshold, Sensitivity, curvetype);
#ifdef DEBUG_DRUM
- Serial.print("Hit : ");
+ Serial.print("[Hit Head] velocity : ");
Serial.print(velocity);
- Serial.print(", ");
+ Serial.print(", velocity rim : ");
Serial.print(velocityRim);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevVel);
Serial.print(", ");
Serial.print(prevVelR);
- Serial.print(", ");
+ Serial.print(", d : ");
Serial.print(prevVel - prevVelR);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
- Serial.print((time_end - time_hit));
- Serial.print(", ");
- Serial.print(RimSensitivity);
- Serial.print(", ");
- Serial.println(RimThreshold);
+ Serial.print(", ScanTime(ms) : ");
+ Serial.println((time_end - time_hit));
#endif
hit = true;
}
@@ -337,14 +344,18 @@ void HelloDrum::cymbal2zoneSensing(byte sens, byte thre, byte scanTime, byte mas
{
#ifdef ESP32
- int Threshold = thre * 40;
- int Sensitivity = sens * 40;
- int edgeThreshold = edgeThre * 40;
-#else
+ piezoValue = piezoValue / 4;
+ sensorValue = sensorValue / 4;
+#endif
+
+#ifdef PULLUP
+ piezoValue = (1024 - piezoValue);
+ sensorValue = (1024 - sensorValue);
+#endif
+
int Threshold = thre * 10;
int Sensitivity = sens * 10;
int edgeThreshold = edgeThre * 10;
-#endif
hit = false;
hitRim = false;
@@ -398,17 +409,17 @@ void HelloDrum::cymbal2zoneSensing(byte sens, byte thre, byte scanTime, byte mas
velocity = curve(velocity, Threshold, Sensitivity, curvetype);
#ifdef DEBUG_DRUM
- Serial.print("Hit Bow : ");
+ Serial.print("[Hit Bow] velocity : ");
Serial.print(velocity);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevVel);
- Serial.print(", ");
+ Serial.print(", firstSensorValue : ");
Serial.print(firstSensorValue);
- Serial.print(", ");
+ Serial.print(", lastSensorValue : ");
Serial.print(lastSensorValue);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
+ Serial.print(", ScanTime(ms) : ");
Serial.println((time_end - time_hit));
#endif
@@ -424,17 +435,17 @@ void HelloDrum::cymbal2zoneSensing(byte sens, byte thre, byte scanTime, byte mas
velocity = curve(velocity, Threshold, Sensitivity, curvetype);
#ifdef DEBUG_DRUM
- Serial.print("Hit Edge : ");
+ Serial.print("[Hit Edge] velocity : ");
Serial.print(velocity);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevVel);
- Serial.print(", ");
+ Serial.print(", firstSensorValue : ");
Serial.print(firstSensorValue);
- Serial.print(", ");
+ Serial.print(", lastSensorValue : ");
Serial.print(lastSensorValue);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
+ Serial.print(", ScanTime(ms) : ");
Serial.println((time_end - time_hit));
#endif
@@ -449,17 +460,13 @@ void HelloDrum::cymbal2zoneSensing(byte sens, byte thre, byte scanTime, byte mas
{
#ifdef DEBUG_DRUM
- Serial.print("Choke : ");
- Serial.print(velocity);
- Serial.print(" (raw:");
- Serial.print(prevVel);
- Serial.print(", ");
+ Serial.print("[Choke] firstSensorValue : ");
Serial.print(firstSensorValue);
- Serial.print(", ");
+ Serial.print(", lastSensorValue : ");
Serial.print(lastSensorValue);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
+ Serial.print(", ScanTime(ms) : ");
Serial.println((time_end - time_hit));
#endif
@@ -473,17 +480,21 @@ void HelloDrum::cymbal2zoneSensing(byte sens, byte thre, byte scanTime, byte mas
void HelloDrum::cymbal3zoneSensing(byte sens, byte thre, byte scanTime, byte maskTime, byte edgeThre, byte cupThre)
{
+
#ifdef ESP32
- int Threshold = thre * 40;
- int Sensitivity = sens * 40;
- int edgeThreshold = edgeThre * 40;
- int cupThreshold = cupThre * 40;
-#else
+ piezoValue = piezoValue / 4;
+ sensorValue = sensorValue / 4;
+#endif
+
+#ifdef PULLUP
+ piezoValue = (1024 - piezoValue);
+ sensorValue = (1024 - sensorValue);
+#endif
+
int Threshold = thre * 10;
int Sensitivity = sens * 10;
int edgeThreshold = edgeThre * 10;
int cupThreshold = cupThre * 10;
-#endif
hit = false;
hitRim = false;
@@ -538,17 +549,17 @@ void HelloDrum::cymbal3zoneSensing(byte sens, byte thre, byte scanTime, byte mas
{
velocity = curve(velocity, Threshold, Sensitivity, curvetype);
#ifdef DEBUG_DRUM
- Serial.print("Hit Bow : ");
+ Serial.print("[Hit Bow] velocity : ");
Serial.print(velocity);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevVel);
- Serial.print(", ");
+ Serial.print(", firstSensorValue : ");
Serial.print(firstSensorValue);
- Serial.print(", ");
+ Serial.print(", lastSensorValue : ");
Serial.print(lastSensorValue);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
+ Serial.print(", ScanTime(ms) : ");
Serial.println((time_end - time_hit));
#endif
hit = true;
@@ -562,17 +573,17 @@ void HelloDrum::cymbal3zoneSensing(byte sens, byte thre, byte scanTime, byte mas
{
velocity = curve(velocity, Threshold, Sensitivity, curvetype);
#ifdef DEBUG_DRUM
- Serial.print("Hit Edge : ");
+ Serial.print("[Hit Edge] velocity : ");
Serial.print(velocity);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevVel);
- Serial.print(", ");
+ Serial.print(", firstSensorValue : ");
Serial.print(firstSensorValue);
- Serial.print(", ");
+ Serial.print(", lastSensorValue : ");
Serial.print(lastSensorValue);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
+ Serial.print(", ScanTime(ms) : ");
Serial.println((time_end - time_hit));
#endif
hitRim = true;
@@ -586,17 +597,17 @@ void HelloDrum::cymbal3zoneSensing(byte sens, byte thre, byte scanTime, byte mas
{
velocity = curve(velocity, Threshold, Sensitivity, curvetype);
#ifdef DEBUG_DRUM
- Serial.print("Hit Cup : ");
+ Serial.print("[Hit Cup] velocity : ");
Serial.print(velocity);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevVel);
- Serial.print(", ");
+ Serial.print(", firstSensorValue : ");
Serial.print(firstSensorValue);
- Serial.print(", ");
+ Serial.print(", lastSensorValue : ");
Serial.print(lastSensorValue);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
+ Serial.print(", ScanTime(ms) : ");
Serial.println((time_end - time_hit));
#endif
hitCup = true;
@@ -609,17 +620,13 @@ void HelloDrum::cymbal3zoneSensing(byte sens, byte thre, byte scanTime, byte mas
else if (firstSensorValue > edgeThreshold && lastSensorValue > edgeThreshold)
{
#ifdef DEBUG_DRUM
- Serial.print("Choke : ");
- Serial.print(velocity);
- Serial.print(" (raw:");
- Serial.print(prevVel);
- Serial.print(", ");
+ Serial.print("[Choke] firstSensorValue : ");
Serial.print(firstSensorValue);
- Serial.print(", ");
+ Serial.print(", lastSensorValue : ");
Serial.print(lastSensorValue);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
+ Serial.print(", ScanTime(ms) : ");
Serial.println((time_end - time_hit));
#endif
choke = true;
@@ -742,20 +749,22 @@ void HelloDrum::TCRT5000Sensing(byte sens, byte thre1, byte thre2, byte scanTime
void HelloDrum::FSRSensing(byte sens, byte thre, byte scanStart, byte scanEnd, byte pedalSens)
{
#ifdef ESP32
- int sensRaw = sens * 40;
- int thre1Raw = thre * 40;
- int ScanStart = scanStart * 40;
- int ScanEnd = scanEnd * 40;
-#else
+ fsr = fsr / 4;
+#endif
+
+#ifdef PULLUP
+ fsr = (1024 - fsr);
+#endif
+
int sensRaw = sens * 10;
int thre1Raw = thre * 10;
int ScanStart = scanStart * 10;
int ScanEnd = scanEnd * 10;
-#endif
+ hit = false;
velocity = 0;
- openHH = false;
- closeHH = false;
+ //openHH = false;
+ //closeHH = false;
//scan start
if (fsr > ScanStart && closeHH == false && pedalVelocityFlag == false && pedalFlag == false)
@@ -788,13 +797,14 @@ void HelloDrum::FSRSensing(byte sens, byte thre, byte scanStart, byte scanEnd, b
}
#ifdef DEBUG_DRUM
- Serial.print("Close : ");
+ Serial.print("[Close] velocity : ");
Serial.print(velocity);
- Serial.print(" (raw time:");
+ Serial.print(" (scan time(ms) : ");
Serial.print(prevVel);
Serial.println(")");
#endif
+ hit = true;
closeHH = true;
openHH = false;
pedalFlag = true;
@@ -812,7 +822,7 @@ void HelloDrum::FSRSensing(byte sens, byte thre, byte scanStart, byte scanEnd, b
if (fsr < ScanEnd && pedalFlag == true)
{
#ifdef DEBUG_DRUM
- Serial.print("Open : ");
+ Serial.print("[Open] sensorValue : ");
Serial.println(fsr);
#endif
pedalFlag = false;
@@ -865,20 +875,14 @@ void HelloDrum::FSRSensing(byte sens, byte thre, byte scanStart, byte scanEnd, b
exFSR = fsr;
#ifdef DEBUG_DRUM
- Serial.print("Move : ");
+ Serial.print("[Move] sensorValue : ");
Serial.print(fsr);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevFsr);
- Serial.print(")");
- Serial.print(sensRaw);
- Serial.print(",");
- Serial.print(thre1Raw);
- Serial.print(",");
- Serial.print(ScanStart);
- Serial.print(",");
- Serial.print(ScanEnd);
- Serial.print(",");
- Serial.println(pedalFlag);
+ Serial.print("), openHH : ");
+ Serial.print(openHH);
+ Serial.print(", closeHH : ");
+ Serial.println(closeHH);
#endif
}
diff --git a/src/hellodrum.h b/src/hellodrum.h
index 69d7270..602b441 100644
--- a/src/hellodrum.h
+++ b/src/hellodrum.h
@@ -1,5 +1,5 @@
/*
- " HELLO DRUM LIBRARY" Ver.0.7.4
+ " HELLO DRUM LIBRARY" Ver.0.7.5
by Ryo Kosaka
@@ -234,6 +234,12 @@ The STL data of pads from 6 inches to 12 inches, hi-hat controllers(
MIDI_CREATE_DEFAULT_INSTANCE();
-//Please name your piezo.
-//The piezo named "crash" is connected to the A0 pin and A1 pin.
+//Please name your cymbal.
+//The cymbal named "crash" is connected to the A0 pin (piezo) and A1 pin (edge sensor).
HelloDrum crash(0, 1);
void setup()
diff --git a/examples/Basic/cymbal_3zone/cymbal_3zone.ino b/examples/Basic/cymbal_3zone/cymbal_3zone.ino
index 468416e..2683b7a 100644
--- a/examples/Basic/cymbal_3zone/cymbal_3zone.ino
+++ b/examples/Basic/cymbal_3zone/cymbal_3zone.ino
@@ -1,7 +1,7 @@
/*
EXAMPLE - 3 Zone Cymbal Sensing
- This sample code tesed with YAMAHA PCY135/PCY155.
+ This sample code is tesed with YAMAHA PCY135/PCY155.
https://open-e-drums.tumblr.com/
*/
@@ -36,8 +36,8 @@ byte RIDE[10] = {
#include
MIDI_CREATE_DEFAULT_INSTANCE();
-//Please name your piezo.
-//The piezo named ride is connected to the A0 pin and A1 pin.
+//Please name your cymbal.
+//The cymbal named ride is connected to the A0 pin (piezo) and A1 pin (edge sensor).
HelloDrum ride(0, 1);
void setup()
diff --git a/examples/Basic/dualPiezoSensing/dualPiezoSensing.ino b/examples/Basic/dualPiezoSensing/dualPiezoSensing.ino
index 6c7da4d..812cab5 100644
--- a/examples/Basic/dualPiezoSensing/dualPiezoSensing.ino
+++ b/examples/Basic/dualPiezoSensing/dualPiezoSensing.ino
@@ -1,7 +1,7 @@
/*
EXAMPLE - Dual Piezo Sensing
- With this sample code, you can make 2 zone snare drum.
+ With this sample code, you can make 2-zone snare drum.
Tested with Roland PD-85
Pads & Controller Circuit:
@@ -61,7 +61,6 @@ void setup()
void loop()
{
-
//Sensing pad.
snare.dualPiezo(SNARE[0], SNARE[1], SNARE[2], SNARE[3], SNARE[4], SNARE[5]); //dualPiezo(byte sens, byte thre, byte scan, byte mask, byte rimSens, byte rimThre);
diff --git a/examples/Basic/hihat/hihat.ino b/examples/Basic/hihat/hihat.ino
index 1db8fbc..f4856a3 100644
--- a/examples/Basic/hihat/hihat.ino
+++ b/examples/Basic/hihat/hihat.ino
@@ -76,7 +76,7 @@ void loop()
MIDI.sendNoteOff(HIHAT[4], 0, 10);
}
//2.close
- else
+ else if (hihatPedal.closeHH == true)
{
MIDI.sendNoteOn(HIHAT[5], hihat.velocity, 10); //(note, velocity, channel)
MIDI.sendNoteOff(HIHAT[5], 0, 10);
@@ -84,7 +84,7 @@ void loop()
}
//when pedal is closed
- if (hihatPedal.closeHH == true)
+ if (hihatPedal.hit == true)
{
MIDI.sendNoteOn(HIHAT_PEDAL[5], hihatPedal.velocity, 10); //(note, velocity, channel)
MIDI.sendNoteOff(HIHAT_PEDAL[5], 0, 10);
diff --git a/examples/Basic/hihat_2zone/hihat_2zone.ino b/examples/Basic/hihat_2zone/hihat_2zone.ino
index 644dfdc..74f55fa 100644
--- a/examples/Basic/hihat_2zone/hihat_2zone.ino
+++ b/examples/Basic/hihat_2zone/hihat_2zone.ino
@@ -1,14 +1,14 @@
/*
- EXAMPLE - 2-zone Hi-Hat with hihat Controller (FSR or TCRT5000)
+ EXAMPLE - 2-zone Hi-Hat with hihat Controller (FSR or TCRT5000)
- This sample code tesed with Roland VH-10.
- https://open-e-drums.tumblr.com/
+ This sample code tesed with Roland VH-10.
+ https://open-e-drums.tumblr.com/
*/
/* NOTICE
- You have to install the MIDI library.
- MIDI : https://playground.arduino.cc/Main/MIDILibrary
+ You have to install the MIDI library.
+ MIDI : https://playground.arduino.cc/Main/MIDILibrary
*/
@@ -87,7 +87,7 @@ void loop()
MIDI.sendNoteOff(HIHAT[5], 0, 10);
}
//2.close
- else
+ else if (hihatPedal.closeHH == true)
{
MIDI.sendNoteOn(HIHAT[6], hihat.velocity, 10); //(note, velocity, channel)
MIDI.sendNoteOff(HIHAT[6], 0, 10);
@@ -105,7 +105,7 @@ void loop()
MIDI.sendNoteOff(HIHAT[7], 0, 10);
}
//2.close
- else
+ else if (hihatPedal.closeHH == true)
{
MIDI.sendNoteOn(HIHAT[8], hihat.velocity, 10); //(note, velocity, channel)
MIDI.sendNoteOff(HIHAT[8], 0, 10);
@@ -113,7 +113,7 @@ void loop()
}
//when pedal is closed
- if (hihatPedal.closeHH == true)
+ if (hihatPedal.hit == true)
{
MIDI.sendNoteOn(HIHAT_PEDAL[5], hihatPedal.velocity, 10); //(note, velocity, channel)
MIDI.sendNoteOff(HIHAT_PEDAL[5], 0, 10);
diff --git a/examples/EEPROM/SimpleSensing/SimpleSensing.ino b/examples/EEPROM/SimpleSensing/SimpleSensing.ino
index 3565ee8..06f46f8 100644
--- a/examples/EEPROM/SimpleSensing/SimpleSensing.ino
+++ b/examples/EEPROM/SimpleSensing/SimpleSensing.ino
@@ -1,5 +1,5 @@
/*
- EXAMPLE - Simple Piezo Sensing
+ EXAMPLE - Simple Piezo Sensing (EEPROM and LCD)
With this sample code, you will make snare and tom using two piezo.
https://open-e-drums.tumblr.com/
diff --git a/examples/EEPROM/minimalDrumkit/minimalDrumkit.ino b/examples/EEPROM/minimalDrumkit/minimalDrumkit.ino
index 81d4bbb..b6da4de 100644
--- a/examples/EEPROM/minimalDrumkit/minimalDrumkit.ino
+++ b/examples/EEPROM/minimalDrumkit/minimalDrumkit.ino
@@ -18,13 +18,12 @@
Button for BACK to digital pin 10
LCD Circuit:https://www.arduino.cc/en/Tutorial/HelloWorld
- LCD RS pin to digital pin 12
- LCD Enable pin to digital pin 11
- LCD D4 pin to digital pin 5
- LCD D5 pin to digital pin 4
- LCD D6 pin to digital pin 3
- LCD D7 pin to digital pin 2
-
+ LCD RS pin to digital pin 12
+ LCD Enable pin to digital pin 11
+ LCD D4 pin to digital pin 5
+ LCD D5 pin to digital pin 4
+ LCD D6 pin to digital pin 3
+ LCD D7 pin to digital pin 2
https://open-e-drums.tumblr.com/
*/
@@ -158,6 +157,23 @@ void loop()
lcd.print(hitPad);
lcd.setCursor(0, 1);
lcd.print(velocity);
+
+ if (hihat.hit == true)
+ {
+ //check open or close
+ //1.open
+ if (hihatPedal.openHH == true)
+ {
+ lcd.setCursor(15, 0);
+ lcd.print("O");
+ }
+ //2.close
+ else if (hihatPedal.closeHH == true)
+ {
+ lcd.setCursor(15, 0);
+ lcd.print("C");
+ }
+ }
}
////////// 2. SENSING & SENDING MIDI////////////
@@ -195,7 +211,7 @@ void loop()
MIDI.sendNoteOff(hihat.noteOpen, 0, 10);
}
//2.close
- else
+ else if (hihatPedal.closeHH == true)
{
MIDI.sendNoteOn(hihat.noteClose, hihat.velocity, 10); //(note of close, velocity, channel)
MIDI.sendNoteOff(hihat.noteClose, 0, 10);
@@ -204,7 +220,7 @@ void loop()
//HIHAT CONTROLLER//
//when hihat is closed
- if (hihatPedal.closeHH == true)
+ if (hihatPedal.hit == true)
{
MIDI.sendNoteOn(hihatPedal.note, hihatPedal.velocity, 10); //(note of pedal, velocity, channel)
MIDI.sendNoteOff(hihatPedal.note, 0, 10);
diff --git a/examples/MUX/muxSensing_minimalDrumKit/muxSensing_minimalDrumkit.ino b/examples/MUX/muxSensing_minimalDrumKit/muxSensing_minimalDrumkit.ino
index c02c71a..5a603a4 100644
--- a/examples/MUX/muxSensing_minimalDrumKit/muxSensing_minimalDrumkit.ino
+++ b/examples/MUX/muxSensing_minimalDrumKit/muxSensing_minimalDrumkit.ino
@@ -207,7 +207,7 @@ void loop()
MIDI.sendNoteOff(hihat.noteOpen, 0, 10);
}
//2.close
- else
+ else if (hihatPedal.closeHH == true)
{
MIDI.sendNoteOn(hihat.noteClose, hihat.velocity, 10); //(note of close, velocity, channel)
MIDI.sendNoteOff(hihat.noteClose, 0, 10);
@@ -216,7 +216,7 @@ void loop()
//HIHAT CONTROLLER//
//when hihat is closed
- if (hihatPedal.closeHH == true)
+ if (hihatPedal.hit == true)
{
MIDI.sendNoteOn(hihatPedal.note, hihatPedal.velocity, 10); //(note of pedal, velocity, channel)
MIDI.sendNoteOff(hihatPedal.note, 0, 10);
diff --git a/library.properties b/library.properties
index c165071..59b0303 100644
--- a/library.properties
+++ b/library.properties
@@ -1,5 +1,5 @@
name=Hello Drum
-version=0.7.4
+version=0.7.5
author=Ryo Kosaka
maintainer=Ryo Kosaka
sentence=Arduino Library for piezo sensing
diff --git a/src/hellodrum.cpp b/src/hellodrum.cpp
index aa1a83c..b295c38 100644
--- a/src/hellodrum.cpp
+++ b/src/hellodrum.cpp
@@ -1,13 +1,14 @@
/*
- "HELLO DRUM LIBRARY" Ver.0.7.4
+ "HELLO DRUM LIBRARY" Ver.0.7.5
- by Ryo Kosaka, Claudio Cas
+ by Ryo Kosaka
GitHub : https://github.com/RyoKosaka/HelloDrum-arduino-Library
Blog : https://open-e-drums.tumblr.com/
*/
-//#define DEBUG_DRUM //<-- uncomment this line to have debug value on Serial
+//#define DEBUG_DRUM //<-- uncomment this line to enable debug mode with Serial.
+//#define PULLUP //<-- uncomment this line to enable pullup mode.
#include "hellodrum.h"
#include "Arduino.h"
@@ -23,6 +24,10 @@ HelloDrum::HelloDrum(byte pin1)
{
pin_1 = pin1;
+#ifdef PULLUP
+ pinMode(pin_1, INPUT_PULLUP);
+#endif
+
//initial EEPROM value
sensitivity = 100; //0
threshold1 = 10; //1
@@ -46,6 +51,11 @@ HelloDrum::HelloDrum(byte pin1, byte pin2)
pin_1 = pin1;
pin_2 = pin2;
+#ifdef PULLUP
+ pinMode(pin_1, INPUT_PULLUP);
+ pinMode(pin_2, INPUT_PULLUP);
+#endif
+
//initial value
sensitivity = 100; //0
threshold1 = 10; //1
@@ -131,14 +141,16 @@ HelloDrumKnob::HelloDrumKnob(byte pin1)
void HelloDrum::singlePiezoSensing(byte sens, byte thre, byte scanTime, byte maskTime)
{
-
#ifdef ESP32
- int Threshold = thre * 40;
- int Sensitivity = sens * 40;
-#else
+ piezoValue = piezoValue / 4;
+#endif
+
+#ifdef PULLUP
+ piezoValue = (1024 - piezoValue);
+#endif
+
int Threshold = thre * 10;
int Sensitivity = sens * 10;
-#endif
hit = false;
@@ -189,13 +201,13 @@ void HelloDrum::singlePiezoSensing(byte sens, byte thre, byte scanTime, byte mas
padIndex = padNum;
#ifdef DEBUG_DRUM
- Serial.print("Hit : ");
+ Serial.print("[Hit] velocity : ");
Serial.print(velocity);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevVel);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
+ Serial.print(", ScanTime(ms) : ");
Serial.println((time_end - time_hit));
#endif
@@ -208,16 +220,19 @@ void HelloDrum::dualPiezoSensing(byte sens, byte thre, byte scanTime, byte maskT
{
#ifdef ESP32
- int Threshold = thre * 40;
- int Sensitivity = sens * 40;
- int RimThreshold = rimThre * 40;
- int RimSensitivity = rimSens * 40;
-#else
+ piezoValue = piezoValue / 4;
+ RimPiezoValue = RimPiezoValue / 4;
+#endif
+
+#ifdef PULLUP
+ piezoValue = (1024 - piezoValue);
+ RimPiezoValue = (1024 - RimPiezoValue);
+#endif
+
int Threshold = thre * 10;
int Sensitivity = sens * 10;
int RimThreshold = rimThre * 10;
int RimSensitivity = rimSens * 10;
-#endif
hit = false;
hitRim = false;
@@ -270,24 +285,20 @@ void HelloDrum::dualPiezoSensing(byte sens, byte thre, byte scanTime, byte maskT
velocityRim = curve(velocityRim, Threshold, Sensitivity, curvetype);
#ifdef DEBUG_DRUM
- Serial.print("HitRim : ");
+ Serial.print("[HitRim] velocity : ");
Serial.print(velocity);
- Serial.print(", ");
+ Serial.print(", velocity rim : ");
Serial.print(velocityRim);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevVel);
Serial.print(", ");
Serial.print(prevVelR);
- Serial.print(", ");
+ Serial.print(", head - rim : ");
Serial.print(prevVel - prevVelR);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
- Serial.print((time_end - time_hit));
- Serial.print(", ");
- Serial.print(RimSensitivity);
- Serial.print(", ");
- Serial.println(RimThreshold);
+ Serial.print(", ScanTime(ms) : ");
+ Serial.println((time_end - time_hit));
#endif
velocity = velocityRim;
hitRim = true;
@@ -300,24 +311,20 @@ void HelloDrum::dualPiezoSensing(byte sens, byte thre, byte scanTime, byte maskT
velocityRim = curve(velocityRim, Threshold, Sensitivity, curvetype);
#ifdef DEBUG_DRUM
- Serial.print("Hit : ");
+ Serial.print("[Hit Head] velocity : ");
Serial.print(velocity);
- Serial.print(", ");
+ Serial.print(", velocity rim : ");
Serial.print(velocityRim);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevVel);
Serial.print(", ");
Serial.print(prevVelR);
- Serial.print(", ");
+ Serial.print(", d : ");
Serial.print(prevVel - prevVelR);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
- Serial.print((time_end - time_hit));
- Serial.print(", ");
- Serial.print(RimSensitivity);
- Serial.print(", ");
- Serial.println(RimThreshold);
+ Serial.print(", ScanTime(ms) : ");
+ Serial.println((time_end - time_hit));
#endif
hit = true;
}
@@ -337,14 +344,18 @@ void HelloDrum::cymbal2zoneSensing(byte sens, byte thre, byte scanTime, byte mas
{
#ifdef ESP32
- int Threshold = thre * 40;
- int Sensitivity = sens * 40;
- int edgeThreshold = edgeThre * 40;
-#else
+ piezoValue = piezoValue / 4;
+ sensorValue = sensorValue / 4;
+#endif
+
+#ifdef PULLUP
+ piezoValue = (1024 - piezoValue);
+ sensorValue = (1024 - sensorValue);
+#endif
+
int Threshold = thre * 10;
int Sensitivity = sens * 10;
int edgeThreshold = edgeThre * 10;
-#endif
hit = false;
hitRim = false;
@@ -398,17 +409,17 @@ void HelloDrum::cymbal2zoneSensing(byte sens, byte thre, byte scanTime, byte mas
velocity = curve(velocity, Threshold, Sensitivity, curvetype);
#ifdef DEBUG_DRUM
- Serial.print("Hit Bow : ");
+ Serial.print("[Hit Bow] velocity : ");
Serial.print(velocity);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevVel);
- Serial.print(", ");
+ Serial.print(", firstSensorValue : ");
Serial.print(firstSensorValue);
- Serial.print(", ");
+ Serial.print(", lastSensorValue : ");
Serial.print(lastSensorValue);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
+ Serial.print(", ScanTime(ms) : ");
Serial.println((time_end - time_hit));
#endif
@@ -424,17 +435,17 @@ void HelloDrum::cymbal2zoneSensing(byte sens, byte thre, byte scanTime, byte mas
velocity = curve(velocity, Threshold, Sensitivity, curvetype);
#ifdef DEBUG_DRUM
- Serial.print("Hit Edge : ");
+ Serial.print("[Hit Edge] velocity : ");
Serial.print(velocity);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevVel);
- Serial.print(", ");
+ Serial.print(", firstSensorValue : ");
Serial.print(firstSensorValue);
- Serial.print(", ");
+ Serial.print(", lastSensorValue : ");
Serial.print(lastSensorValue);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
+ Serial.print(", ScanTime(ms) : ");
Serial.println((time_end - time_hit));
#endif
@@ -449,17 +460,13 @@ void HelloDrum::cymbal2zoneSensing(byte sens, byte thre, byte scanTime, byte mas
{
#ifdef DEBUG_DRUM
- Serial.print("Choke : ");
- Serial.print(velocity);
- Serial.print(" (raw:");
- Serial.print(prevVel);
- Serial.print(", ");
+ Serial.print("[Choke] firstSensorValue : ");
Serial.print(firstSensorValue);
- Serial.print(", ");
+ Serial.print(", lastSensorValue : ");
Serial.print(lastSensorValue);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
+ Serial.print(", ScanTime(ms) : ");
Serial.println((time_end - time_hit));
#endif
@@ -473,17 +480,21 @@ void HelloDrum::cymbal2zoneSensing(byte sens, byte thre, byte scanTime, byte mas
void HelloDrum::cymbal3zoneSensing(byte sens, byte thre, byte scanTime, byte maskTime, byte edgeThre, byte cupThre)
{
+
#ifdef ESP32
- int Threshold = thre * 40;
- int Sensitivity = sens * 40;
- int edgeThreshold = edgeThre * 40;
- int cupThreshold = cupThre * 40;
-#else
+ piezoValue = piezoValue / 4;
+ sensorValue = sensorValue / 4;
+#endif
+
+#ifdef PULLUP
+ piezoValue = (1024 - piezoValue);
+ sensorValue = (1024 - sensorValue);
+#endif
+
int Threshold = thre * 10;
int Sensitivity = sens * 10;
int edgeThreshold = edgeThre * 10;
int cupThreshold = cupThre * 10;
-#endif
hit = false;
hitRim = false;
@@ -538,17 +549,17 @@ void HelloDrum::cymbal3zoneSensing(byte sens, byte thre, byte scanTime, byte mas
{
velocity = curve(velocity, Threshold, Sensitivity, curvetype);
#ifdef DEBUG_DRUM
- Serial.print("Hit Bow : ");
+ Serial.print("[Hit Bow] velocity : ");
Serial.print(velocity);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevVel);
- Serial.print(", ");
+ Serial.print(", firstSensorValue : ");
Serial.print(firstSensorValue);
- Serial.print(", ");
+ Serial.print(", lastSensorValue : ");
Serial.print(lastSensorValue);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
+ Serial.print(", ScanTime(ms) : ");
Serial.println((time_end - time_hit));
#endif
hit = true;
@@ -562,17 +573,17 @@ void HelloDrum::cymbal3zoneSensing(byte sens, byte thre, byte scanTime, byte mas
{
velocity = curve(velocity, Threshold, Sensitivity, curvetype);
#ifdef DEBUG_DRUM
- Serial.print("Hit Edge : ");
+ Serial.print("[Hit Edge] velocity : ");
Serial.print(velocity);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevVel);
- Serial.print(", ");
+ Serial.print(", firstSensorValue : ");
Serial.print(firstSensorValue);
- Serial.print(", ");
+ Serial.print(", lastSensorValue : ");
Serial.print(lastSensorValue);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
+ Serial.print(", ScanTime(ms) : ");
Serial.println((time_end - time_hit));
#endif
hitRim = true;
@@ -586,17 +597,17 @@ void HelloDrum::cymbal3zoneSensing(byte sens, byte thre, byte scanTime, byte mas
{
velocity = curve(velocity, Threshold, Sensitivity, curvetype);
#ifdef DEBUG_DRUM
- Serial.print("Hit Cup : ");
+ Serial.print("[Hit Cup] velocity : ");
Serial.print(velocity);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevVel);
- Serial.print(", ");
+ Serial.print(", firstSensorValue : ");
Serial.print(firstSensorValue);
- Serial.print(", ");
+ Serial.print(", lastSensorValue : ");
Serial.print(lastSensorValue);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
+ Serial.print(", ScanTime(ms) : ");
Serial.println((time_end - time_hit));
#endif
hitCup = true;
@@ -609,17 +620,13 @@ void HelloDrum::cymbal3zoneSensing(byte sens, byte thre, byte scanTime, byte mas
else if (firstSensorValue > edgeThreshold && lastSensorValue > edgeThreshold)
{
#ifdef DEBUG_DRUM
- Serial.print("Choke : ");
- Serial.print(velocity);
- Serial.print(" (raw:");
- Serial.print(prevVel);
- Serial.print(", ");
+ Serial.print("[Choke] firstSensorValue : ");
Serial.print(firstSensorValue);
- Serial.print(", ");
+ Serial.print(", lastSensorValue : ");
Serial.print(lastSensorValue);
- Serial.print("), loopTimes");
+ Serial.print("), loopTimes : ");
Serial.print(loopTimes);
- Serial.print(" ScanTime ms ");
+ Serial.print(", ScanTime(ms) : ");
Serial.println((time_end - time_hit));
#endif
choke = true;
@@ -742,20 +749,22 @@ void HelloDrum::TCRT5000Sensing(byte sens, byte thre1, byte thre2, byte scanTime
void HelloDrum::FSRSensing(byte sens, byte thre, byte scanStart, byte scanEnd, byte pedalSens)
{
#ifdef ESP32
- int sensRaw = sens * 40;
- int thre1Raw = thre * 40;
- int ScanStart = scanStart * 40;
- int ScanEnd = scanEnd * 40;
-#else
+ fsr = fsr / 4;
+#endif
+
+#ifdef PULLUP
+ fsr = (1024 - fsr);
+#endif
+
int sensRaw = sens * 10;
int thre1Raw = thre * 10;
int ScanStart = scanStart * 10;
int ScanEnd = scanEnd * 10;
-#endif
+ hit = false;
velocity = 0;
- openHH = false;
- closeHH = false;
+ //openHH = false;
+ //closeHH = false;
//scan start
if (fsr > ScanStart && closeHH == false && pedalVelocityFlag == false && pedalFlag == false)
@@ -788,13 +797,14 @@ void HelloDrum::FSRSensing(byte sens, byte thre, byte scanStart, byte scanEnd, b
}
#ifdef DEBUG_DRUM
- Serial.print("Close : ");
+ Serial.print("[Close] velocity : ");
Serial.print(velocity);
- Serial.print(" (raw time:");
+ Serial.print(" (scan time(ms) : ");
Serial.print(prevVel);
Serial.println(")");
#endif
+ hit = true;
closeHH = true;
openHH = false;
pedalFlag = true;
@@ -812,7 +822,7 @@ void HelloDrum::FSRSensing(byte sens, byte thre, byte scanStart, byte scanEnd, b
if (fsr < ScanEnd && pedalFlag == true)
{
#ifdef DEBUG_DRUM
- Serial.print("Open : ");
+ Serial.print("[Open] sensorValue : ");
Serial.println(fsr);
#endif
pedalFlag = false;
@@ -865,20 +875,14 @@ void HelloDrum::FSRSensing(byte sens, byte thre, byte scanStart, byte scanEnd, b
exFSR = fsr;
#ifdef DEBUG_DRUM
- Serial.print("Move : ");
+ Serial.print("[Move] sensorValue : ");
Serial.print(fsr);
- Serial.print(" (raw:");
+ Serial.print(" (raw value : ");
Serial.print(prevFsr);
- Serial.print(")");
- Serial.print(sensRaw);
- Serial.print(",");
- Serial.print(thre1Raw);
- Serial.print(",");
- Serial.print(ScanStart);
- Serial.print(",");
- Serial.print(ScanEnd);
- Serial.print(",");
- Serial.println(pedalFlag);
+ Serial.print("), openHH : ");
+ Serial.print(openHH);
+ Serial.print(", closeHH : ");
+ Serial.println(closeHH);
#endif
}
diff --git a/src/hellodrum.h b/src/hellodrum.h
index 69d7270..602b441 100644
--- a/src/hellodrum.h
+++ b/src/hellodrum.h
@@ -1,5 +1,5 @@
/*
- " HELLO DRUM LIBRARY" Ver.0.7.4
+ " HELLO DRUM LIBRARY" Ver.0.7.5
by Ryo Kosaka